IV. Введение в сетевой анализ#
1.Графы улично-дорожной сети из osmnx#
Библиотека osmnx предоставляет удобные инструменты для работы с улично-дорожной сетью как с графом.
Графы в osmnx представляют собой математические структуры, где:
Узлы (nodes) — это объекты на уличной сети, например, перекрестки или конечные точки дорог.
Ребра (edges) — это соединения между узлами, то есть сегменты дорог, улиц или других типов инфраструктуры.
В osmnx используется структура графа, где ребра могут содержать информацию о расстояниях, времени в пути, типах дорог и других характеристиках транспортной сети. С помощью этого подхода можно анализировать доступность, проводить сетевой анализ, искать кратчайшие пути, строить зоны доступности и многое другое.
import osmnx as ox
import geopandas as gpd
import networkx as nx
import matplotlib.pyplot as plt
import numpy as np
1.1 Получение графа уличной сети#
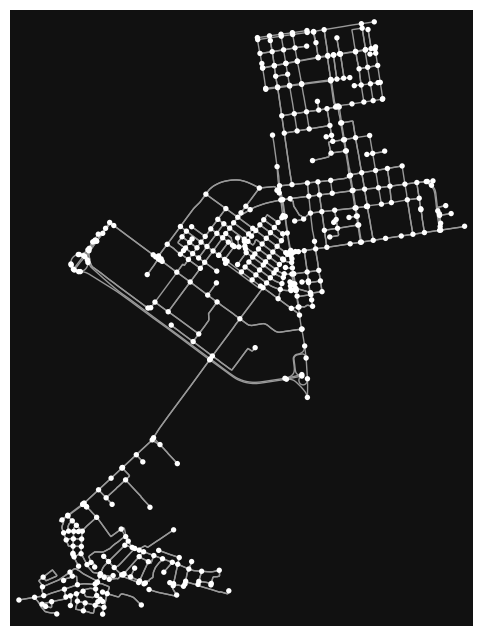
Сначала создадим граф для района с использованием данных OpenStreetMap (OSM).
# Указываем район (например, Ленинский район Екатеринбурга)
location = "Ленинский район, Екатеринбург"
# Получаем граф уличной сети для района с типом "drive" (автомобильный)
graph = ox.graph_from_place(location, network_type='drive')
# Строим граф
ox.plot_graph(ox.project_graph(graph))
(<Figure size 800x800 with 1 Axes>, <Axes: >)
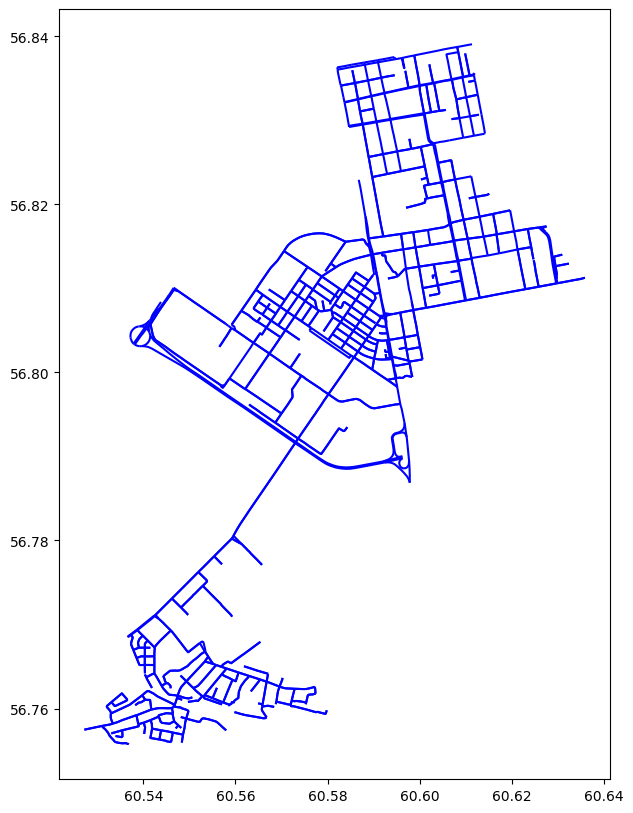
1.2 Преобразование графа в GeoDataFrame#
Для анализа и визуализации данных можно преобразовать граф в геометрический формат, например, в GeoDataFrame, чтобы работать с линиями и узлами как с геометриями
# Получаем узлы и ребра в формате GeoDataFrame
nodes, edges = ox.graph_to_gdfs(graph)
# Визуализируем ребра
edges.plot(figsize=(10, 10), color='blue')
<Axes: >
2. Пространственный сетевой анализ и networkx#
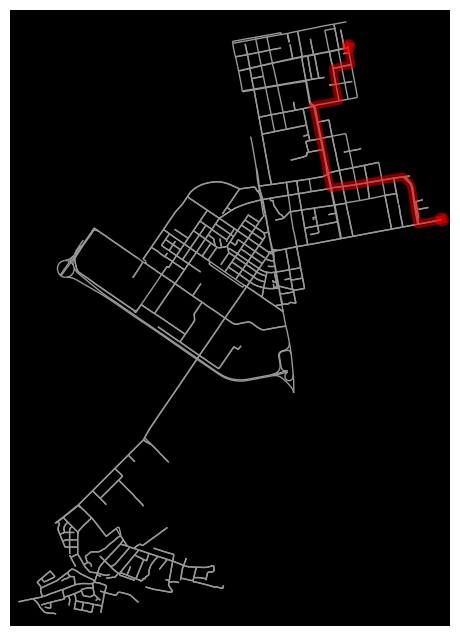
2.1 Поиск кратчайшего пути между двумя точками#
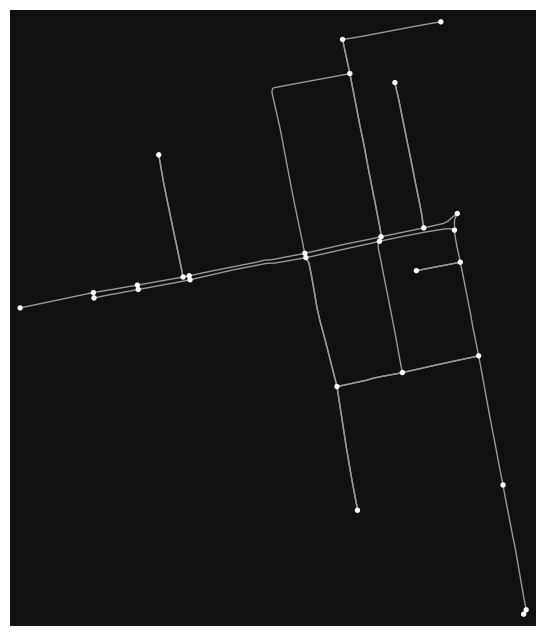
Одним из наиболее распространенных применений сетевого анализа является нахождение кратчайшего пути между двумя точками
# Указываем стартовую и конечную точки
start_coords = (60.6572, 56.8385)
end_coords = (60.6570, 56.8100)
# Преобразуем координаты в узлы графа
start_node = ox.distance.nearest_nodes(graph, X=start_coords[0], Y=start_coords[1])
end_node = ox.distance.nearest_nodes(graph, X=end_coords[0], Y=end_coords[1])
# Находим кратчайший путь между двумя узлами
route = nx.shortest_path(graph, source=start_node, target=end_node, weight='length')
# Визуализируем маршрут
ox.plot_graph_route(graph, route, route_linewidth=6, node_size=0, bgcolor='k')
(<Figure size 800x800 with 1 Axes>, <Axes: >)
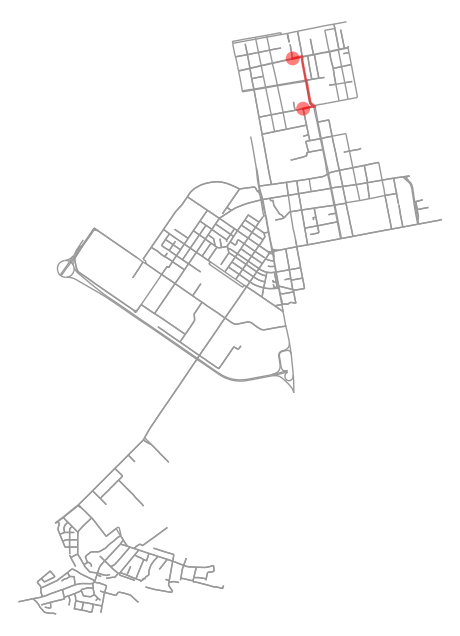
Кратчайший путь между POI
# Загружаем POI (например, рестораны)
pois = ox.geometries_from_place(location, tags={"amenity": "restaurant"})
# Конвертация POI в ту же систему координат, что и граф
pois = pois.to_crs(graph.graph["crs"])
# Выбираем две случайные точки из pois
random_points = pois.sample(n=2, random_state=42)
poi_1 = random_points.iloc[0].geometry
poi_2 = random_points.iloc[1].geometry
# Шаг 2: Поиск ближайших узлов графа к POI
orig_node = ox.distance.nearest_nodes(graph, X=poi_1.x, Y=poi_1.y)
dest_node = ox.distance.nearest_nodes(graph, X=poi_2.x, Y=poi_2.y)
# Шаг 3: Кратчайший путь
shortest_path = nx.shortest_path(graph, source=orig_node, target=dest_node, weight="length")
shortest_distance = nx.shortest_path_length(graph, source=orig_node, target=dest_node, weight="length")
print("Shortest path:", shortest_path)
print("Shortest distance (meters):", shortest_distance)
# Визуализация
ox.plot_graph_route(graph, shortest_path, route_linewidth=2, node_size=0, bgcolor="white")
/var/folders/ry/9bb7wrz54vq_kn2ytlj6ynzm0000gn/T/ipykernel_60118/281450167.py:2: FutureWarning: The `geometries` module and `geometries_from_X` functions have been renamed the `features` module and `features_from_X` functions. Use these instead. The `geometries` module and function names are deprecated and will be removed in the v2.0.0 release. See the OSMnx v2 migration guide: https://github.com/gboeing/osmnx/issues/1123
pois = ox.geometries_from_place(location, tags={"amenity": "restaurant"})
/Library/Frameworks/Python.framework/Versions/3.10/lib/python3.10/site-packages/pandas/core/frame.py:717: DeprecationWarning: Passing a BlockManager to GeoDataFrame is deprecated and will raise in a future version. Use public APIs instead.
warnings.warn(
/Library/Frameworks/Python.framework/Versions/3.10/lib/python3.10/site-packages/pandas/core/frame.py:717: DeprecationWarning: Passing a BlockManager to GeoDataFrame is deprecated and will raise in a future version. Use public APIs instead.
warnings.warn(
/Library/Frameworks/Python.framework/Versions/3.10/lib/python3.10/site-packages/pandas/core/frame.py:717: DeprecationWarning: Passing a BlockManager to GeoDataFrame is deprecated and will raise in a future version. Use public APIs instead.
warnings.warn(
/Library/Frameworks/Python.framework/Versions/3.10/lib/python3.10/site-packages/pandas/core/algorithms.py:1743: DeprecationWarning: is_sparse is deprecated and will be removed in a future version. Check `isinstance(dtype, pd.SparseDtype)` instead.
return lib.map_infer(values, mapper, convert=convert)
/Library/Frameworks/Python.framework/Versions/3.10/lib/python3.10/site-packages/sklearn/utils/validation.py:605: DeprecationWarning: is_sparse is deprecated and will be removed in a future version. Check `isinstance(dtype, pd.SparseDtype)` instead.
if is_sparse(pd_dtype):
/Library/Frameworks/Python.framework/Versions/3.10/lib/python3.10/site-packages/sklearn/utils/validation.py:614: DeprecationWarning: is_sparse is deprecated and will be removed in a future version. Check `isinstance(dtype, pd.SparseDtype)` instead.
if is_sparse(pd_dtype) or not is_extension_array_dtype(pd_dtype):
/Library/Frameworks/Python.framework/Versions/3.10/lib/python3.10/site-packages/pandas/core/frame.py:717: DeprecationWarning: Passing a BlockManager to GeoDataFrame is deprecated and will raise in a future version. Use public APIs instead.
warnings.warn(
/Library/Frameworks/Python.framework/Versions/3.10/lib/python3.10/site-packages/pandas/core/algorithms.py:1743: DeprecationWarning: is_sparse is deprecated and will be removed in a future version. Check `isinstance(dtype, pd.SparseDtype)` instead.
return lib.map_infer(values, mapper, convert=convert)
/Library/Frameworks/Python.framework/Versions/3.10/lib/python3.10/site-packages/sklearn/utils/validation.py:605: DeprecationWarning: is_sparse is deprecated and will be removed in a future version. Check `isinstance(dtype, pd.SparseDtype)` instead.
if is_sparse(pd_dtype):
/Library/Frameworks/Python.framework/Versions/3.10/lib/python3.10/site-packages/sklearn/utils/validation.py:614: DeprecationWarning: is_sparse is deprecated and will be removed in a future version. Check `isinstance(dtype, pd.SparseDtype)` instead.
if is_sparse(pd_dtype) or not is_extension_array_dtype(pd_dtype):
/Library/Frameworks/Python.framework/Versions/3.10/lib/python3.10/site-packages/pandas/core/frame.py:717: DeprecationWarning: Passing a BlockManager to GeoDataFrame is deprecated and will raise in a future version. Use public APIs instead.
warnings.warn(
Shortest path: [223291355, 175048165, 1387234850, 2908690121, 1387234852, 10581827806, 806275555, 176144584, 10798749441, 10798749439]
Shortest distance (meters): 1170.84
(<Figure size 800x800 with 1 Axes>, <Axes: >)
2.2 Вычисление центральности в узле графов#
Центральность узлов в графе помогает определить важность каждого узла в сети.
Существует несколько типов центральности, которые могут быть использованы в зависимости от задачи:
Центральность по степени (Degree Centrality) — измеряет количество связей (ребер), которые имеет узел. Узлы с высокой степенью центральности считаются важными, потому что они подключены к большому числу других узлов.
Центральность по посредничеству (Betweenness Centrality) — измеряет, насколько часто узел находится на кратчайших путях между другими узлами. Узлы с высокой центральностью между отношениями являются “мостами”, которые связывают различные части сети.
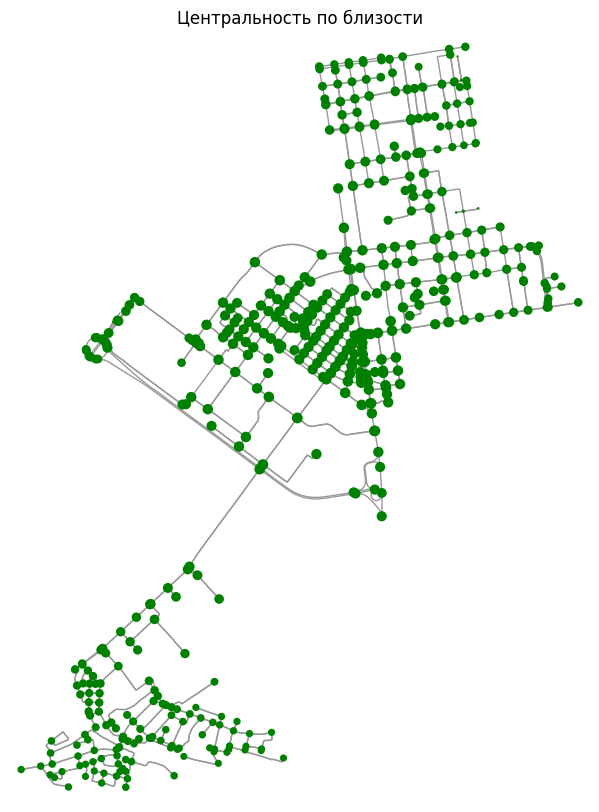
Центральность по близости (Closeness Centrality) — измеряет, насколько близко узел расположен к остальным узлам в сети. Узлы с высокой центральностью по близости быстро достигают других узлов, что делает их важными для распространения информации.
# Преобразуем в проекцию UTM для удобства расчетов
graph_projected = ox.project_graph(graph)
# Центральность по степени
degree_centrality = nx.degree_centrality(graph_projected)
# Центральность по посредничеству (betweenness centrality)
betweenness_centrality = nx.betweenness_centrality(graph_projected, weight='length')
# Центральность по близости
closeness_centrality = nx.closeness_centrality(graph_projected)
/Library/Frameworks/Python.framework/Versions/3.10/lib/python3.10/site-packages/pandas/core/frame.py:717: DeprecationWarning: Passing a BlockManager to GeoDataFrame is deprecated and will raise in a future version. Use public APIs instead.
warnings.warn(
/Library/Frameworks/Python.framework/Versions/3.10/lib/python3.10/site-packages/pandas/core/frame.py:717: DeprecationWarning: Passing a BlockManager to GeoDataFrame is deprecated and will raise in a future version. Use public APIs instead.
warnings.warn(
/Library/Frameworks/Python.framework/Versions/3.10/lib/python3.10/site-packages/pandas/core/frame.py:717: DeprecationWarning: Passing a BlockManager to GeoDataFrame is deprecated and will raise in a future version. Use public APIs instead.
warnings.warn(
/Library/Frameworks/Python.framework/Versions/3.10/lib/python3.10/site-packages/pandas/core/frame.py:717: DeprecationWarning: Passing a BlockManager to GeoDataFrame is deprecated and will raise in a future version. Use public APIs instead.
warnings.warn(
/Library/Frameworks/Python.framework/Versions/3.10/lib/python3.10/site-packages/pandas/core/frame.py:717: DeprecationWarning: Passing a BlockManager to GeoDataFrame is deprecated and will raise in a future version. Use public APIs instead.
warnings.warn(
Центральность по степени: На карте уличной сети выделяются наиболее “связанные” узлы.
# Визуализация центральности по степени
fig, ax = plt.subplots(figsize=(10, 10))
node_sizes = [v * 1000 for v in degree_centrality.values()]
ox.plot_graph(graph_projected, node_size=node_sizes, node_color='red', bgcolor='white', ax=ax, show=False)
plt.title("Центральность по степени")
ax.set_axis_off()
plt.show()
/Library/Frameworks/Python.framework/Versions/3.10/lib/python3.10/site-packages/pandas/core/frame.py:717: DeprecationWarning: Passing a BlockManager to GeoDataFrame is deprecated and will raise in a future version. Use public APIs instead.
warnings.warn(
/Library/Frameworks/Python.framework/Versions/3.10/lib/python3.10/site-packages/pandas/core/frame.py:717: DeprecationWarning: Passing a BlockManager to GeoDataFrame is deprecated and will raise in a future version. Use public APIs instead.
warnings.warn(

Центральность по посредничеству : Отображение узлов, которые служат “мостами” между различными частями сети.
# Визуализация центральности по посредничеству
fig, ax = plt.subplots(figsize=(10, 10))
node_sizes = [v * 1000 for v in betweenness_centrality.values()]
ox.plot_graph(graph_projected, node_size=node_sizes, node_color='blue', bgcolor='white', ax=ax, show=False)
ax.set_axis_off()
plt.title("Центральность по посредничеству ")
plt.show()
/Library/Frameworks/Python.framework/Versions/3.10/lib/python3.10/site-packages/pandas/core/frame.py:717: DeprecationWarning: Passing a BlockManager to GeoDataFrame is deprecated and will raise in a future version. Use public APIs instead.
warnings.warn(
/Library/Frameworks/Python.framework/Versions/3.10/lib/python3.10/site-packages/pandas/core/frame.py:717: DeprecationWarning: Passing a BlockManager to GeoDataFrame is deprecated and will raise in a future version. Use public APIs instead.
warnings.warn(

Центральность по близости: Выделение узлов, которые могут быстро достигать других узлов в сети.
# Визуализация центральности по близости
fig, ax = plt.subplots(figsize=(10, 10))
node_sizes = [v * 1000 for v in closeness_centrality.values()]
ox.plot_graph(graph_projected, node_size=node_sizes, node_color='green', bgcolor='white', ax=ax, show=False)
ax.set_axis_off()
plt.title("Центральность по близости")
plt.show()
/Library/Frameworks/Python.framework/Versions/3.10/lib/python3.10/site-packages/pandas/core/frame.py:717: DeprecationWarning: Passing a BlockManager to GeoDataFrame is deprecated and will raise in a future version. Use public APIs instead.
warnings.warn(
/Library/Frameworks/Python.framework/Versions/3.10/lib/python3.10/site-packages/pandas/core/frame.py:717: DeprecationWarning: Passing a BlockManager to GeoDataFrame is deprecated and will raise in a future version. Use public APIs instead.
warnings.warn(
2.3 Нахождение компонент связности в графе#
Компоненты связности — это подмножества узлов, которые соединены друг с другом рёбрами, и нет рёбер между компонентами. Этот анализ полезен для изучения сегментации сети.
# Находим компоненты связности в графе
components = list(nx.connected_components(graph.to_undirected()))
# Выводим количество компонент и размер первой компоненты
print(f"Количество компонент связности: {len(components)}")
print(f"Размер первой компоненты: {len(components[0])}")
Количество компонент связности: 1
Размер первой компоненты: 533
Мы находим компоненты связности в графе, преобразуя его в неориентированный граф.
Выводим количество компонент и размер первой компоненты.
Этот анализ помогает понять, насколько сеть разделена на отдельные части.
2.4 Вычисление матрицы расстояний между узлами#
Матрица расстояний между всеми узлами графа полезна для анализа, чтобы понять, как далеко друг от друга находятся узлы в сети.
# Вычисляем матрицу расстояний между всеми узлами
distance_matrix = dict(nx.all_pairs_dijkstra_path_length(graph, weight='length'))
# Пример: Расстояние от первого узла до всех других
first_node = list(graph.nodes())[0]
distances_from_first_node = distance_matrix[first_node]
# Выводим первые 5 расстояний
print(list(distances_from_first_node.items())[:5])
[(175048165, 0), (1387234850, 24.667), (2908690121, 55.996), (1387234852, 78.44800000000001), (1387234851, 101.275)]
Мы вычисляем матрицу расстояний между всеми узлами с использованием алгоритма Дейкстры.
Выводим расстояния от первого узла до других узлов в графе.
Эта информация полезна для анализа доступности и плотности сети.
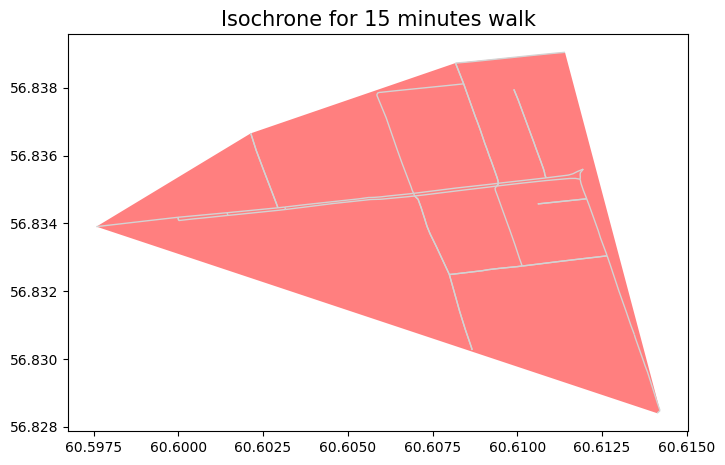
2.5 Изохроны (пешеходная доступность)#
Изохроны представляют собой области, которые можно достичь за определенный промежуток времени. Например, можно построить изохрону, которая охватывает территорию, которую можно достичь за 15 минут пешком.
# Указываем координаты начальной точки (например, центр Ленинского района)
start_coords = (60.6572, 56.8385)
# Преобразуем координаты в узел графа
start_node = ox.distance.nearest_nodes(graph, X=start_coords[0], Y=start_coords[1])
# Определяем максимальный радиус для изохроны (например, 15 минут пешеходного пути)
max_time = 15 * 60 # Время в секундах (15 минут)
# Строим подграф (зону доступности) вокруг ближайшего узла
subgraph = nx.ego_graph(graph, start_node, radius=max_time, distance='length')
/Library/Frameworks/Python.framework/Versions/3.10/lib/python3.10/site-packages/pandas/core/frame.py:717: DeprecationWarning: Passing a BlockManager to GeoDataFrame is deprecated and will raise in a future version. Use public APIs instead.
warnings.warn(
/Library/Frameworks/Python.framework/Versions/3.10/lib/python3.10/site-packages/pandas/core/algorithms.py:1743: DeprecationWarning: is_sparse is deprecated and will be removed in a future version. Check `isinstance(dtype, pd.SparseDtype)` instead.
return lib.map_infer(values, mapper, convert=convert)
/Library/Frameworks/Python.framework/Versions/3.10/lib/python3.10/site-packages/sklearn/utils/validation.py:605: DeprecationWarning: is_sparse is deprecated and will be removed in a future version. Check `isinstance(dtype, pd.SparseDtype)` instead.
if is_sparse(pd_dtype):
/Library/Frameworks/Python.framework/Versions/3.10/lib/python3.10/site-packages/sklearn/utils/validation.py:614: DeprecationWarning: is_sparse is deprecated and will be removed in a future version. Check `isinstance(dtype, pd.SparseDtype)` instead.
if is_sparse(pd_dtype) or not is_extension_array_dtype(pd_dtype):
ox.plot_graph(subgraph)
/Library/Frameworks/Python.framework/Versions/3.10/lib/python3.10/site-packages/pandas/core/frame.py:717: DeprecationWarning: Passing a BlockManager to GeoDataFrame is deprecated and will raise in a future version. Use public APIs instead.
warnings.warn(
/Library/Frameworks/Python.framework/Versions/3.10/lib/python3.10/site-packages/pandas/core/frame.py:717: DeprecationWarning: Passing a BlockManager to GeoDataFrame is deprecated and will raise in a future version. Use public APIs instead.
warnings.warn(
(<Figure size 800x800 with 1 Axes>, <Axes: >)
# Получаем геометрию зоны доступности (линии)
area = ox.convert.graph_to_gdfs(subgraph, nodes=False, edges=True)
# Объединяем все линии в одну геометрию
service_area_lines = area.geometry.unary_union
# Создаем ограничивающую геометрию вокруг участка УДС
isochrone = service_area_lines.convex_hull
# Визуализируем
fig, ax = plt.subplots(figsize=(8, 8))
area.plot(ax=ax, color='lightgray', linewidth=1)
gpd.GeoSeries([isochrone]).plot(ax=ax, color='red', alpha=0.5)
ax.set_title("Isochrone for 15 minutes walk", fontsize=15)
plt.show()
/Library/Frameworks/Python.framework/Versions/3.10/lib/python3.10/site-packages/pandas/core/frame.py:717: DeprecationWarning: Passing a BlockManager to GeoDataFrame is deprecated and will raise in a future version. Use public APIs instead.
warnings.warn(
/Library/Frameworks/Python.framework/Versions/3.10/lib/python3.10/site-packages/pandas/core/frame.py:717: DeprecationWarning: Passing a BlockManager to GeoDataFrame is deprecated and will raise in a future version. Use public APIs instead.
warnings.warn(
3. Пространственный сетевой анализ с использованием внешних API#
Множество сервисов и библиотек предоставляют готовые решения для работы с пространственными сетями
3.1. OSRM#
3.1.1 Кратчайшее расстояние#
import requests
# URL API OSRM
base_url = "http://router.project-osrm.org/route/v1/driving/"
# Координаты точек (долгота, широта)
start_coords = [55.7558, 37.6173]
end_coords = [55.7045, 37.5308]
start = f"{start_coords[1]},{start_coords[0]}"
end = f"{end_coords[1]},{end_coords[0]}"
# Запрос к API
response = requests.get(f"{base_url}{start};{end}?overview=full")
data = response.json()
# Извлечение расстояния и маршрута
distance = data["routes"][0]["distance"] # В метрах
route = data["routes"][0]["geometry"] # GeoJSON
print(f"Shortest distance: {distance / 1000:.2f} km")
Shortest distance: 12.45 km
Посмотрим на результат на карте
import polyline
import folium
# Декодируем маршрут из GeoJSON
decoded_route = polyline.decode(route)
# Визуализация с помощью folium
# Создаем карту с центром в стартовой точке
m = folium.Map(location=start_coords, zoom_start=12, tiles='cartodbpositron')
# Добавляем маршрут на карту
folium.PolyLine(decoded_route, color="blue", weight=5, opacity=0.7).add_to(m)
# Добавляем маркеры для стартовой и конечной точки
folium.Marker(start_coords, popup="Start", icon=folium.Icon(color="green")).add_to(m)
folium.Marker(end_coords, popup="End", icon=folium.Icon(color="red")).add_to(m)
# Отображаем карту
m
3.2. Open Route Service#
Примечание: в этом и последующих разделах результаты не будут отображаться здесь, так как для выполнения кода требуются личные API-ключи. Вы можете получить их в своём личном кабинете у каждого провайдера по соответствующим ссылкам и запустить код локально на компьютере. Места, куда нужно вставить ключ, обозначены как your_key.
3.2.1. Изохроны#
В запросе мы передаём:
locations — список из одной точки (координаты, но в формате [долгота, широта]);
range — список интервалов времени (в секундах), для которых хотим построить изохроны (300 с = 5 мин, 600 с = 10 мин и т. д.);
units = “m” (метры) и запрашиваем некоторые атрибуты, например, площадь полигона.
Через requests.post отправляем запрос, получаем GeoJSON — и сразу же при помощи gpd.read_file превращаем его в GeoDataFrame, готовый для дальнейшей визуализации.
import requests
# API OpenRouteService (требуется ключ API)
ors_api_key = "your_key"
url = "https://api.openrouteservice.org/v2/isochrones/foot-walking"
# Параметры
params = {
"locations": [[37.6173, 55.7558]],
"range": [300, 600, 900], # Изохроны в секундах (5, 10, 15 минут)
}
headers = {
"Authorization": ors_api_key,
"Content-Type": "application/json",
}
# Запрос к API
response = requests.post(url, json=params, headers=headers)
isochrones = response.json()
# Преобразуем GeoJSON в GeoDataFrame
gdf_isochrones = gpd.GeoDataFrame.from_features(
isochrones["features"], crs="EPSG:4326"
)
#Визуализируем результат на карте
gdf_isochrones.explore( tiles='cartodbpositron')
/Library/Frameworks/Python.framework/Versions/3.10/lib/python3.10/site-packages/urllib3/util/ssl_.py:260: DeprecationWarning: ssl.PROTOCOL_TLS is deprecated
context = SSLContext(ssl_version or PROTOCOL_TLS)
/Library/Frameworks/Python.framework/Versions/3.10/lib/python3.10/site-packages/urllib3/connection.py:407: DeprecationWarning: ssl.match_hostname() is deprecated
match_hostname(cert, asserted_hostname)
---------------------------------------------------------------------------
KeyError Traceback (most recent call last)
Cell In[17], line 25
20 isochrones = response.json()
23 # Преобразуем GeoJSON в GeoDataFrame
24 gdf_isochrones = gpd.GeoDataFrame.from_features(
---> 25 isochrones["features"], crs="EPSG:4326"
26 )
28 #Визуализируем результат на карте
29 gdf_isochrones.explore( tiles='cartodbpositron')
KeyError: 'features'
3.2.2. Кратчайшее расстояние#
Для получения детального маршрута через OpenRouteService указываем два пункта (координаты) в параметре
coordinates.В ответе мы получаем GeoJSON, где в
featuresлежит LineString с трассой маршрута.
gpd.GeoDataFrame.from_featuresпозволяет превратить GeoJSON-маршрут в GeoDataFrame, что упрощает отрисовку
ors_url = "https://api.openrouteservice.org/v2/directions/driving-car"
# Параметры запроса
params = {
"start": "37.6173,55.7558",
"end": "37.5665,55.7332",
}
headers = {
"Authorization": ors_api_key,
}
response = requests.get(ors_url, params=params, headers=headers)
path = response.json()
# Достаем расстояние и время
distance = path["features"][0]["properties"]["segments"][0]["distance"] # в метрах
duration = path["features"][0]["properties"]["segments"][0]["duration"] # в секундах
print(f"Distance: {distance / 1000:.2f} km")
print(f"Duration: {duration / 60:.2f} minutes")
# Преобразуем GeoJSON в GeoDataFrame
gdf_path = gpd.GeoDataFrame.from_features(
path["features"], crs="EPSG:4326"
)
#Визуализируем результат на карте
gdf_path.explore(tiles='cartodbpositron')
---------------------------------------------------------------------------
KeyError Traceback (most recent call last)
Cell In[18], line 18
15 path = response.json()
17 # Достаем расстояние и время
---> 18 distance = path["features"][0]["properties"]["segments"][0]["distance"] # в метрах
19 duration = path["features"][0]["properties"]["segments"][0]["duration"] # в секундах
21 print(f"Distance: {distance / 1000:.2f} km")
KeyError: 'features'
3.2.3 Матрица расстояний#
Матрица расстояний (distance matrix) возвращает таблицу, где каждая ячейка (i,j) — это расстояние (или время) от точки i до точки j.
locations — массив координат точек, между которыми нужно узнать расстояния/времена.
metrics задаёт, что именно возвращать: расстояние (в метрах) и длительность (в секундах).
Результатmatrix_data— JSON, внутри которого естьdistances(матрица чисел) иdurations. Дальше можно загрузить эти данные в Pandas DataFrame и визуализировать в виде «тепловой» матрицы или просто использовать для расчётов.
ors_matrix_url = "https://api.openrouteservice.org/v2/matrix/driving-car"
# Координаты
locations = [
[37.6173, 55.7558],
[37.5665, 55.7332],
[37.5905, 55.7602],
]
data = {
"locations": locations,
"metrics": ["distance", "duration"],
}
headers = {
"Authorization": ors_api_key,
"Content-Type": "application/json",
}
response = requests.post(ors_matrix_url, json=data, headers=headers)
matrix = response.json()
# Вывод матрицы расстояний
print(matrix["distances"])
print(matrix["durations"])
---------------------------------------------------------------------------
KeyError Traceback (most recent call last)
Cell In[19], line 24
21 matrix = response.json()
23 # Вывод матрицы расстояний
---> 24 print(matrix["distances"])
25 print(matrix["durations"])
KeyError: 'distances'
3.3 Graphopper#
3.3.1. Кратчайшее расстояние#
GraphHopper API позволяет запрашивать маршруты аналогично ORS, но у него немного иной формат запроса:
point— список координат в формате «широта,долгота»;указываем
vehicle="car"и локализациюlocale="ru".В ответе
route_ghсодержатся подробности маршрута: дистанция (в метрах), время (в миллисекундах), сам трек (encoded polyline).Эту информацию можно декодировать или сразу визуализировать, если преобразовать полилинию в геометрию.
gh_url = "https://graphhopper.com/api/1/route"
graphhopper_api_key = "your_key"
# Параметры запроса
params = {
"point": ["55.7558,37.6173", "55.7332,37.5665"], # Москва, две точки
"vehicle": "car",
"key": graphhopper_api_key,
}
response = requests.get(gh_url, params=params)
route = response.json()
# Достаем расстояние и время
distance = route["paths"][0]["distance"] # в метрах
duration = route["paths"][0]["time"] / 1000 # в секундах
print(f"Distance: {distance / 1000:.2f} km")
print(f"Duration: {duration / 60:.2f} minutes")
---------------------------------------------------------------------------
KeyError Traceback (most recent call last)
Cell In[20], line 15
12 route = response.json()
14 # Достаем расстояние и время
---> 15 distance = route["paths"][0]["distance"] # в метрах
16 duration = route["paths"][0]["time"] / 1000 # в секундах
18 print(f"Distance: {distance / 1000:.2f} km")
KeyError: 'paths'
3.3.2 Матрица расстояний#
Запрашиваем у GraphHopper матрицу расстояний/времён между списком точек.
Тело запроса (
body) содержит:
массив
points(координаты точек),список
vehicles(тип транспортного средства),
out_arrays— какие массивы вернуть (расстояния или время).Ответ
matrix_ghбудет похож на структуру ORS: вложенные списки, где элемент [i][j] — это дистанция или время между точкой i и j.
gh_matrix_url = "https://graphhopper.com/api/1/matrix"
headers = {"Content-Type": "application/json"}
# Координаты
locations = [
[37.6173, 55.7558], # точка 1
[37.5665, 55.7332], # точка 2
[37.5905, 55.7602], # точка 3
]
data = {
"points": locations,
"vehicle": "car",
"key": graphhopper_api_key,
}
response = requests.post(gh_matrix_url, json=data, headers=headers)
matrix = response.json()